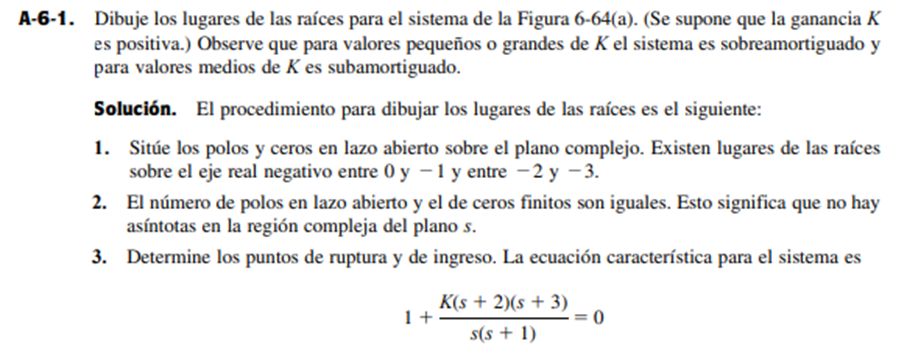
Ejercicio del libro " Ingeniería de Control Moderna" de Katsuhijo Ogata. 3-4 Considere los controladores automáticos industriales cuyas acciones de control son proporcionales, integrales, proporcionales-integrales, proporcionales-derivativas y proporcionales-integrales-derivativas. Las funciones de transferencia de estos controladores se obtienen, respectivamente a partir de donde U(s) es la transformada de Laplace de u(t), la salida de controlador, y E(s) es la transformada de Laplace de e(t), la señal del error. Trace las curvas u(t) frente a t para cada uno de los cinco tipos de controladores, cuando la señal de error es ( e) e(t) = función escalón unitario ( r) e(t) = función rampa unitaria Al trazar las curvas, suponga que los valores numéricos de Kp , Ki , Ti , Td están dados por Función 1 y 2 Función 3 y 4 Función 5